MQOne
Rugged terrain robot designs are important for field robotics missions. A number of commercial platforms are available, however, at an impressive price. With this project, we aim at designing an autonomous robot that is as suited for the field as its commercial counterparts but at a far lower price. Here, we will report on our results and also DIY advice for building such a robot on your own.
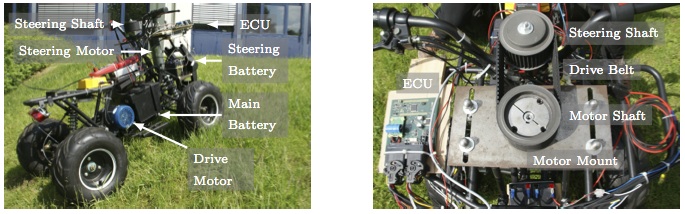
The MQOne is a rugged-terrain UGV based on an electric quad bike. We modified the steering and added a hydraulic brake system. It is now ready for drive-by-wire. First results on the hardware design can be found in:
Rebel, S., F. Hüning, I. Scholl, and A. Ferrein (2015). “MQOne: Low-Cost Design for a Rugged-Terrain Robot Platform”. In: Intelligent Robotics and Applications - 8th International Conference, ICIRA 2015, Portsmouth, UK, August 24-27, 2015, Proceedings, Part II. Ed. by H. Liu, N. Kubota, X. Zhu, R. Dillmann, and D. Zhou. Vol. 9245. Lecture Notes in Computer Science, pp. 209–221.
In terms of autonomous navigation, we are working towards adapting the ROS SBPL path planning package for Ackerman steering for the MQOne. We reported on a local SBPL planner which already works fine for our 1/10 carts. We will soon adapt this planner to MQOne.
Limpert, N., S. Schiffer, and A. Ferrein (2015). “A Local Planner for Ackermann-Driven Vehicles in ROS SBPL”. In: Proceedings of the International Conference on Pattern Recognition Association of South Africa and Robotics and Mechatronics (PRASA-RobMech-2015). IEEE, pp. 172–177
The goal of this project is to deploy the robot for mapping underground mines in the UPNS4D+ project.
Stay tuned for updates on the project.